Android HdrViewfinder Sample
This demo implements a real-time high-dynamic-range camera viewfinder, by alternating the sensor's exposure time between two exposure values on even and odd frames, and then compositing together the latest two frames whenever a new frame is captured.
Introduction
A small demo of advanced camera functionality with the Android camera2 API.
This demo implements a real-time high-dynamic-range camera viewfinder, by alternating the sensor's exposure time between two exposure values on even and odd frames, and then compositing together the latest two frames whenever a new frame is captured.
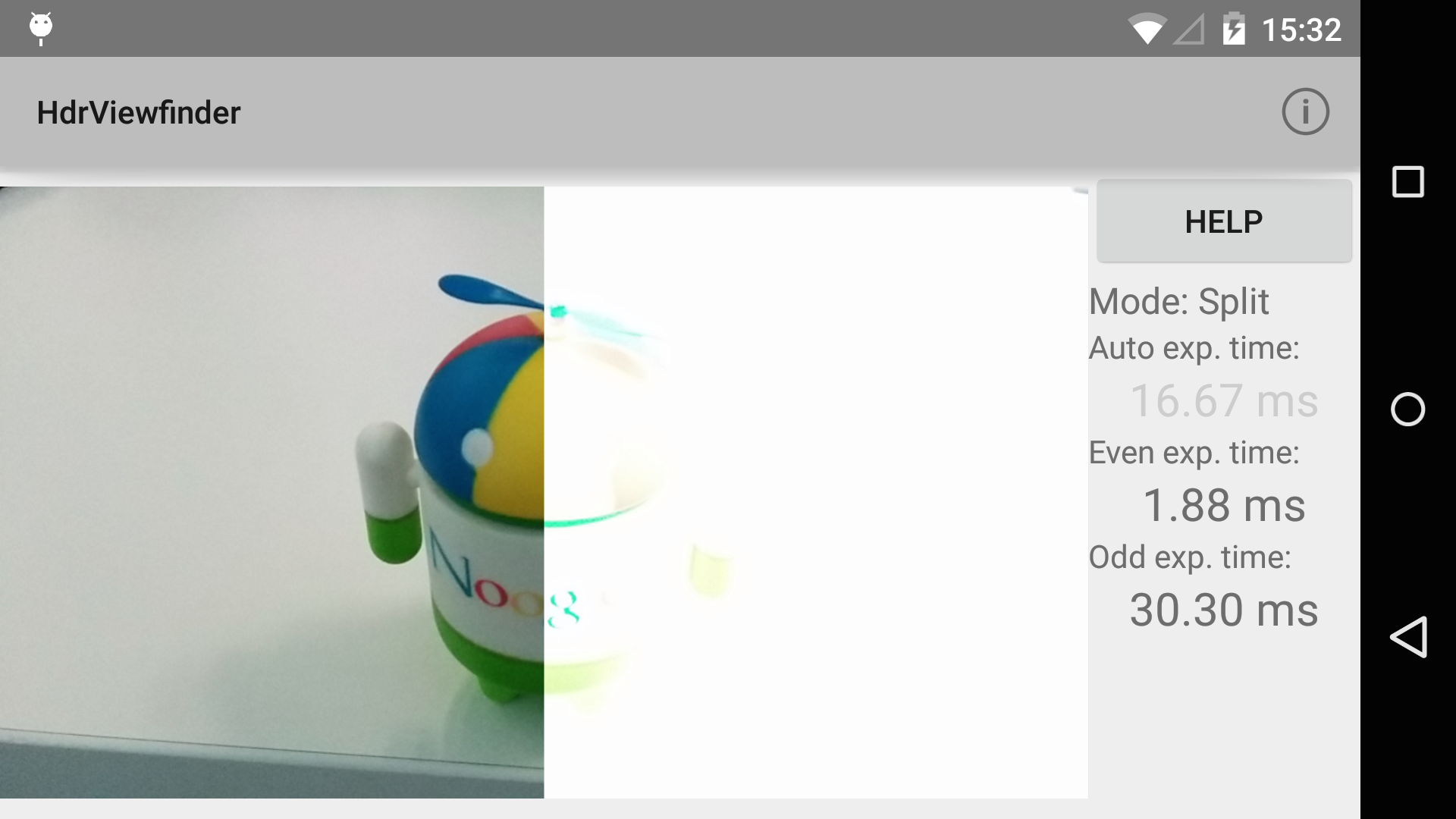
The demo has three modes: Regular auto-exposure viewfinder, split-screen manual exposure, and the fused HDR viewfinder. The latter two use manual exposure controlled by the user, by swiping up/down on the right and left halves of the viewfinder. The left half controls the exposure time of even frames, and the right half controls the exposure time of odd frames.
In split-screen mode, the even frames are shown on the left and the odd frames on the right, so the user can see two different exposures of the scene simultaneously. In fused HDR mode, the even/odd frames are merged together into a single image. By selecting different exposure values for the even/odd frames, the fused image has a higher dynamic range than the regular viewfinder.
The HDR fusion and the split-screen viewfinder processing is done with RenderScript; as is the necessary YUV->RGB conversion. The camera subsystem outputs YUV images naturally, while the GPU and display subsystems generally only accept RGB data. Therefore, after the images are fused/composited, a standard YUV->RGB color transform is applied before the the data is written to the output Allocation. The HDR fusion algorithm is very simple, and tends to result in lower-contrast scenes, but has very few artifacts and can run very fast.
Data is passed between the subsystems (camera, RenderScript, and display) using the Android android.view.Surface class, which allows for zero-copy transport of large buffers between processes and subsystems.
Pre-requisites
- Android SDK 26
- Android Build Tools v26.0.1
- Android Support Repository
Screenshots

Getting Started
This sample uses the Gradle build system. To build this project, use the "gradlew build" command or use "Import Project" in Android Studio.
Support
- Google+ Community: https://plus.google.com/communities/105153134372062985968
- Stack Overflow: http://stackoverflow.com/questions/tagged/android
If you've found an error in this sample, please file an issue: https://github.com/googlesamples/android-HdrViewfinder
Patches are encouraged, and may be submitted by forking this project and submitting a pull request through GitHub. Please see CONTRIBUTING.md for more details.
License
Copyright 2017 The Android Open Source Project, Inc.
Licensed to the Apache Software Foundation (ASF) under one or more contributor license agreements. See the NOTICE file distributed with this work for additional information regarding copyright ownership. The ASF licenses this file to you under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
compile "com.android.support:support-v4:26.1.0"
compile "com.android.support:support-v13:26.1.0"
compile "com.android.support:cardview-v7:26.1.0"
compile "com.android.support:appcompat-v7:26.1.0"
compile 'com.android.support:design:24.0.0'
compileSdkVersion 26
minSdkVersion 21
targetSdkVersion 26
package com.example.android.hdrviewfinder
versionCode 1
versionName 1.0
uses-permission
- android.permission.CAMERA
- android.permission.RECORD_AUDIO
HdrViewfinderActivity
A small demo of advanced camera functionality with the Android camera2 API. *
This demo implements a real-time high-dynamic-range camera viewfinder, by alternating the sensor's exposure time between two exposure values on even and odd frames, and then compositing together the latest two frames whenever a new frame is captured.
*
The demo has three modes: Regular auto-exposure viewfinder, split-screen manual exposure, and the fused HDR viewfinder. The latter two use manual exposure controlled by the user, by swiping up/down on the right and left halves of the viewfinder. The left half controls the exposure time of even frames, and the right half controls the exposure time of odd frames.
*
In split-screen mode, the even frames are shown on the left and the odd frames on the right, so the user can see two different exposures of the scene simultaneously. In fused HDR mode, the even/odd frames are merged together into a single image. By selecting different exposure values for the even/odd frames, the fused image has a higher dynamic range than the regular viewfinder.
*
The HDR fusion and the split-screen viewfinder processing is done with RenderScript; as is the necessary YUV->RGB conversion. The camera subsystem outputs YUV images naturally, while the GPU and display subsystems generally only accept RGB data. Therefore, after the images are fused/composited, a standard YUV->RGB color transform is applied before the the data is written to the output Allocation. The HDR fusion algorithm is very simple, and tends to result in lower-contrast scenes, but has very few artifacts and can run very fast.
*
Data is passed between the subsystems (camera, RenderScript, and display) using the Android {@link android.view.Surface} class, which allows for zero-copy transport of large buffers between processes and subsystems.
View for the camera preview.
Root view of this activity.
This shows the current mode of the app.
Show help dialogs.
Return the current state of the camera permissions.
Attempt to initialize the camera.
Callback received when a permissions request has been completed.
Configure the surfaceview and RS processing.
Once camera is open and output surfaces are ready, configure the RS processing and the camera device inputs/outputs.
Start running an HDR burst on a configured camera session
Listener for completed captures Invoked on UI thread
Callbacks for the FixedAspectSurfaceView
Callbacks for CameraOps
Utility methods